Do chassi ao
protótipo completo
Acompanhe as etapas de montagem do guincho hospitalar autônomo — desde a base estrutural em MDF e ferro até a carcaça final em PETG com todos os sistemas eletrônicos, sensores e módulos de IA integrados.
 ETAPA_01
3D RENDER
AGUARDANDO IMAGEM
ETAPA_01
3D RENDER
AGUARDANDO IMAGEM
Fase 01 — Estrutura Primária
Base e
Chassi
Ponto de partida da construção: o chassi retangular em MDF e ferro soldado define o footprint da base (~60×40cm). As quatro rodas são posicionadas — duas dianteiras giratórias (360°) e duas traseiras maiores para tração motorizada. Nenhuma eletrônica ainda, apenas a espinha dorsal estrutural do robô.
Componentes desta etapa
 ETAPA_02
3D RENDER
AGUARDANDO IMAGEM
ETAPA_02
3D RENDER
AGUARDANDO IMAGEM
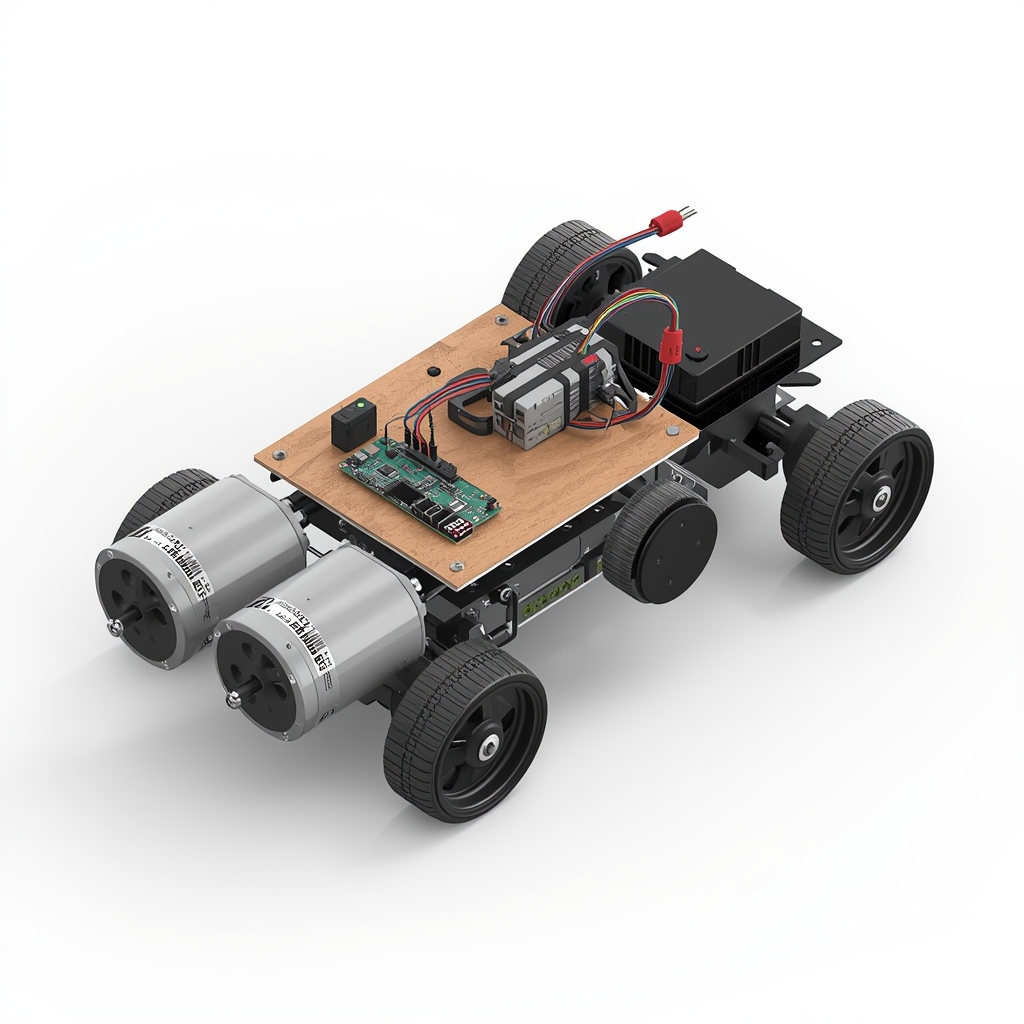
Fase 02 — Propulsão e Energia
Sistema de
Tração
Os dois motores DC 12V de alto torque são fixados ao chassi traseiro com driver BTS7960 para controle independente esquerdo/direito. A bateria recarregável é ancorada na base com suportes, e o cabeamento principal é organizado — controlando velocidade e direção via controle PID.
Componentes desta etapa
 ETAPA_03
3D RENDER
AGUARDANDO IMAGEM
ETAPA_03
3D RENDER
AGUARDANDO IMAGEM
Fase 03 — Estrutura de Elevação
Braço e
Coluna
A coluna vertical central (~80cm) em MDF/ferro é erguida sobre o chassi, conectando-se ao braço lateral horizontal com motor de elevação dedicado e sistema de polia. O contrapeso traseiro é instalado para prevenir tombamento. Peças de conexão em PETG impressas em 3D integram os módulos.
Componentes desta etapa
 ETAPA_04
3D RENDER
AGUARDANDO IMAGEM
ETAPA_04
3D RENDER
AGUARDANDO IMAGEM
Fase 04 — Sistemas Inteligentes
Eletrônica
e Sensores
ESP32 e Raspberry Pi 4 são montados no painel interno. A câmera USB frontal (640×480 mín.) é fixada para visão computacional. O sensor FSR 402 de pressão é instalado no ponto de contato do braço. LEDs de status, botão físico de emergência e todo o cabeamento organizado completam esta fase crítica.
Componentes desta etapa
 ETAPA_05
COMPLETO ✓
GUINCHO FINALIZADO
ETAPA_05
COMPLETO ✓
GUINCHO FINALIZADO
Fase 05 — Produto Final
Guincho
Finalizado
Carcaça completa em PETG branco com detalhes azuis (esquema visual médico), revestimento EVA Foam nos pontos de contato com o paciente, cinto de segurança integrado ao braço, câmera USB frontal visível, LEDs de status em operação. Sistema autônomo pronto para controle remoto via plataforma web.
Acabamentos finais